
Afternoon, Jun 12th, Thur, Nashville TN USA
🔥🔥🔥 News 🔥🔥🔥
The 4th Anti-UAV Workshop has been accepted by CVPR 2025.
We have currently released the training sets for Track 1 and Track 2 and Track 3. You can find them at the following links:
Description of the 4th Anti-UAV Workshop & Challenge
Civil unmanned aerial vehicles (UAVs), a.k.a. drones, have been widely used in a broad range of civil application domains, including search & rescue, delivery of goods, and remote sensing, owning to their autonomy, flexibility, affordability, and popularity. UAV applications offer possible civil and public domain applications in which single or multiple UAVs may be used, as shown in Figures 1 and 2. Nevertheless, we should be aware of the potential threat to our lives caused by UAV intrusion, since UAVs can also be used to conduct physical attacks (e.g., via explosives) and cyber-attacks (e.g., hacking critical infrastructure). Moreover, unauthorized UAVs sometimes violate aviation safety regulations, thereby bringing hazards to civilian aircraft and passengers and even causing airport disruptions and flight delays. As shown in Figure 3, there have been multiple instances of drone sightings halted air traffic at airports, leading to significant economic losses for airlines. It is highly desired to develop anti-UAV techniques to defend against drone accidents.
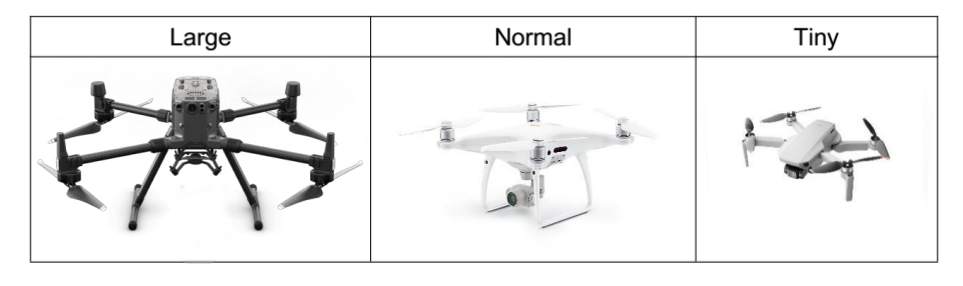
Figure 1. Illustrations of civil UAVs.
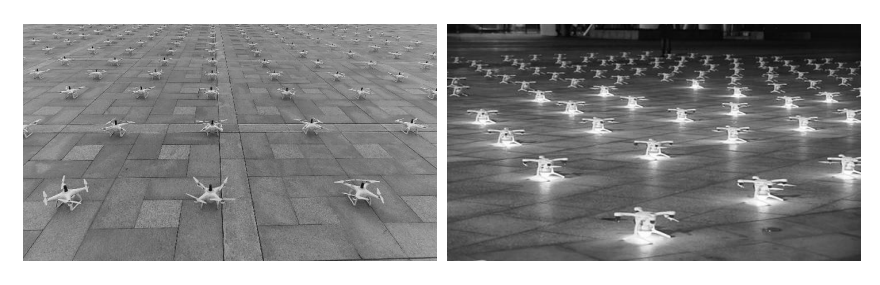
Figure 2. Illustrations of multiple civil UAVs.
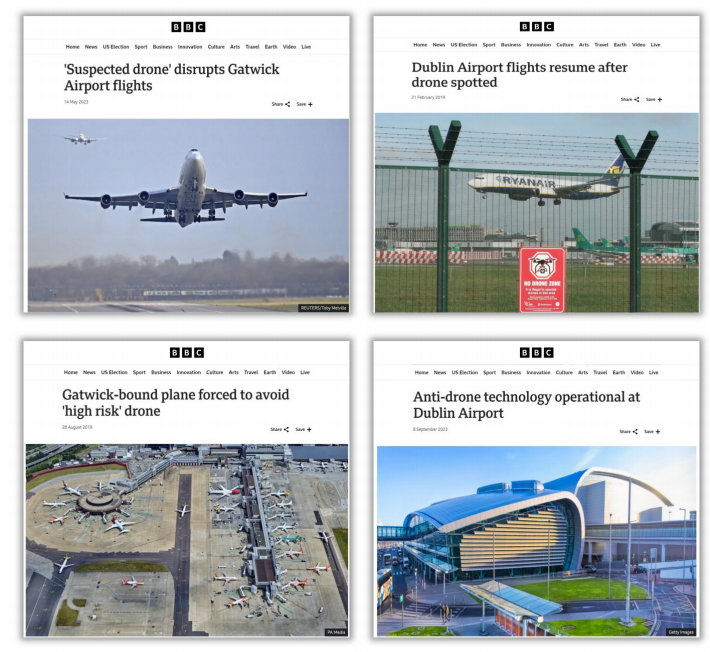
Figure 3. Examples of UAV-related incidents.
Historically, radar is certainly a compelling technology for detecting traditional incoming airborne threats. However, these comparatively small UAVs are extremely difficult for radar to see because they have very small radar cross-sections, low flight altitudes, and erratic flight paths. Therefore, how to use computer vision and machine learning algorithms to perceive UAVs is a crucial part of the whole UAV-defense system.
Traditional studies on computer vision and machine learning for UAV detection and tracking lack a high-quality benchmark in dynamic environments. To mitigate this gap, we have held the 1st, the 2nd and the 3rd Anti-UAV Workshops & Challenges, with CVPR 2020, ICCV 2021 and CVPR 2023, respectively, and have released a dataset consisting of 410 video sequences. These workshops have attracted the attention of researchers ranging over multiple fields all over the world. Many submitted solutions outperform the baseline methods, making significant contributions to address the anti-UAV problem.
The 4th anti-UAV Challenge and Workshop will maintain the formerly established benchmark dataset that consists of 410 high-quality video sequences, as shown in Figure 4, while extending the range of anti-UAV tasks by adding a new challenge, i.e., multi-UAV tracking, as illustrated in Figure 5. Specifically, in the multi-UAV tracking scenarios, the video frames may contain a group of flying UAVs (even to 30 objects) against various complex backgrounds such as clouds, buildings, mountains, woods, etc. Moreover, the small flying UAV targets fly at inconsistent velocity/accelerated velocity with complicated motion types and trajectories, increasing the difficulty of accurate object tracking.
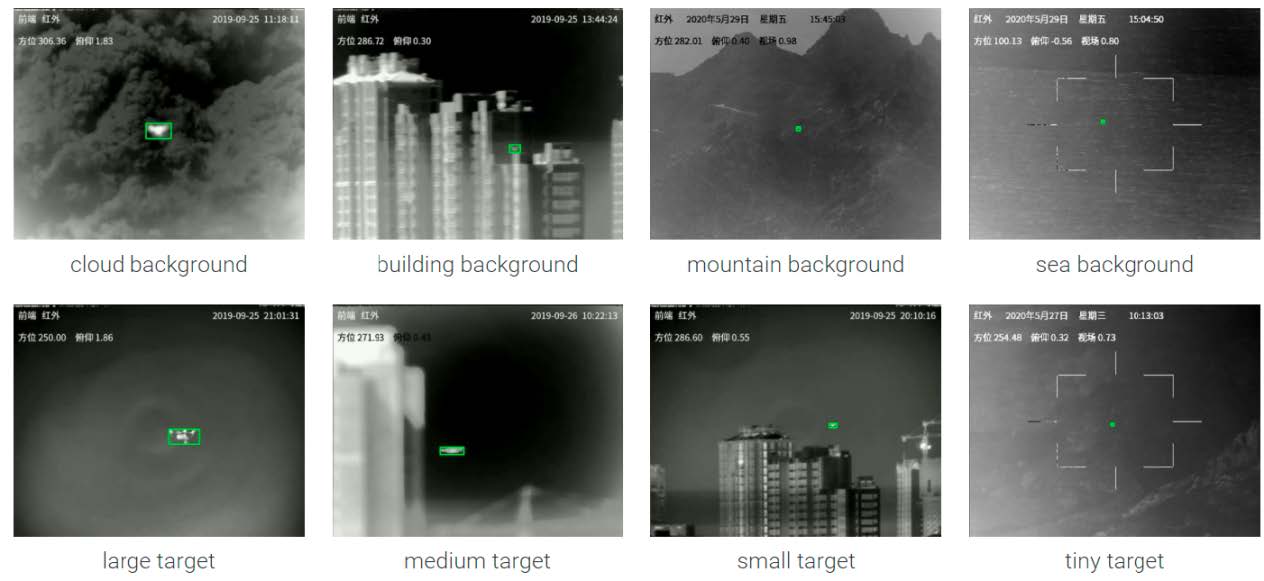
Figure 4. Examples different types of single-UAV target against various backgrounds.

Figure 5. Examples of multi-UAV objects against different backgrounds.
The workshop encourages participants to develop intelligent computer vision and machine learning algorithms that can detect and track UAV targets in thermal infrared videos with high accuracy and strong robustness. Particularly, algorithms that can detect and track fast-moving small UAVs (single-UAV or multi-UAV), especially multiple flying UAV objects, in complex environments (e.g., occlusion caused by clouds/buildings/trees, and fake targets like kites, balloons, birds, etc.) are highly expected.
This workshop will bring together academic and industrial experts in the field of UAVs to discuss the techniques and applications of tracking UAVs. Participants are invited to submit their original contributions, surveys, and case studies that address the UAV’s detection and tracking issues.
Award for Each Track
 1st-Place: Certificate + 1000 USD
1st-Place: Certificate + 1000 USD
 2nd-Place: Certificate + 500 USD
2nd-Place: Certificate + 500 USD
 3rd-Place: Certificate + 300 USD
3rd-Place: Certificate + 300 USD
Award for Paper
 Best Paper: Certificate + 1000 USD
Best Paper: Certificate + 1000 USD
SPONSORS


Contact
Please feel free to send any question or comments to: lijianan@bit.edu.cn.