-
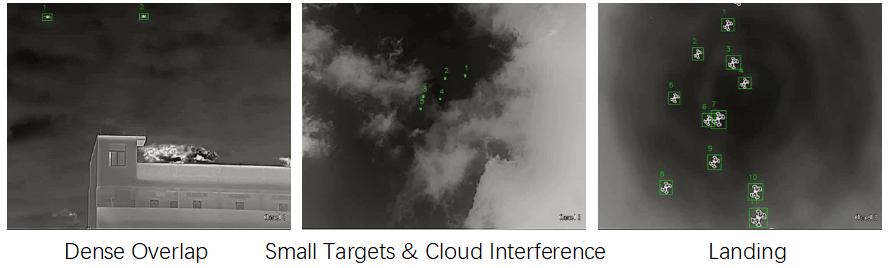
 cloud background
cloud background
-
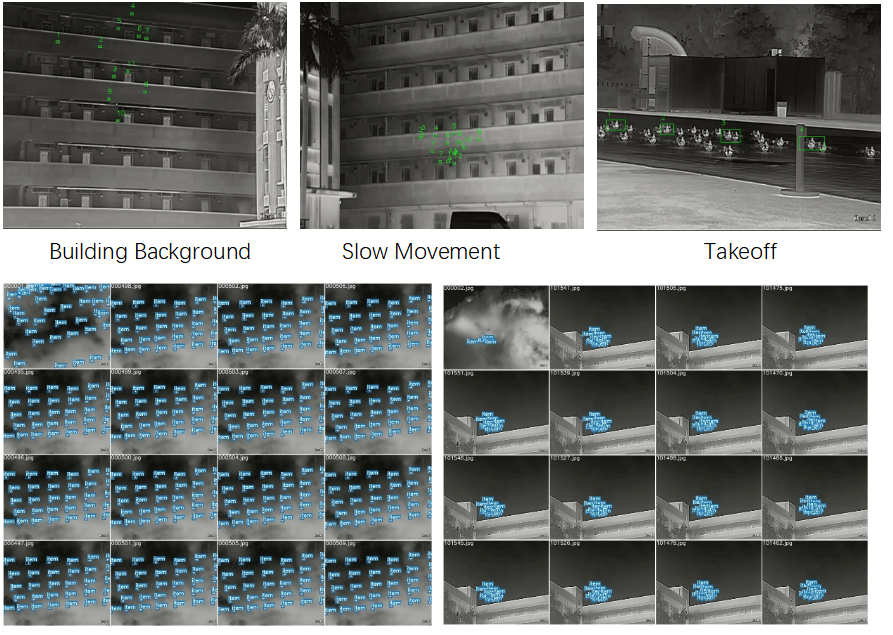
 building background
building background
-
 mountain background
mountain background
-
 sea background
sea background
-
 fast movement
fast movement
-
 out_of_focus
out_of_focus
-
 scale variation
scale variation
-
 no-target scene
no-target scene
-
 large target
large target
-
 medium target
medium target
-
 small target
small target
-
 tiny target
tiny target
Subset for Each Track
Train-Track1: 223 videos for training your algorithm.
Train-Track2: 223 videos for training your algorithm.
Train-Track3: 200 videos for training your algorithm.
Test-Track1: 216 videos for the final submission for track 1.
Test-Track2: 216 videos for the final submission for track 2.
Test-Track3: 100 videos for the final submission for track 3.
Attribute Description
| Attribute |
|
|---|---|
| OV/VE | Out-of-View:the target moves out of the current view. |
| OC | Occlusion: the target is partially or heavily occluded. |
| FM | Fast Motion: the target moves quickly. |
| SV | Scale Variation: the scale of the bounding boxes over the frames vary significantly. |
| TC/IC | Thermal/Infrared Crossover: the target has a similar temperature to other objects or background surroundings. |
| DBC | Dynamic Background Clusters: there are dynamic changes (e.g., waves, leaves, birds) in the background around the target. |
| LR | Low Resolution: the area of the bounding box is small. |
| TS | Target Scale: the target is with a tiny, small, medium or large scale. |